- Home
- China
- World
- Asia-Pacific
- Americas
- Europe
- Middle-East and Africa
- Politics
- Business
- Opinions
- Tech & Sci
- Culture
- Sports
- Travel
- Nature
- Picture
- Video
- Live
- TV
- Documentary
- Radio
- Specials
- Learn Chinese

Share

Copied
The small robotic arm can form a combination with the larger arm on the core module of China's space station. /China Media Group
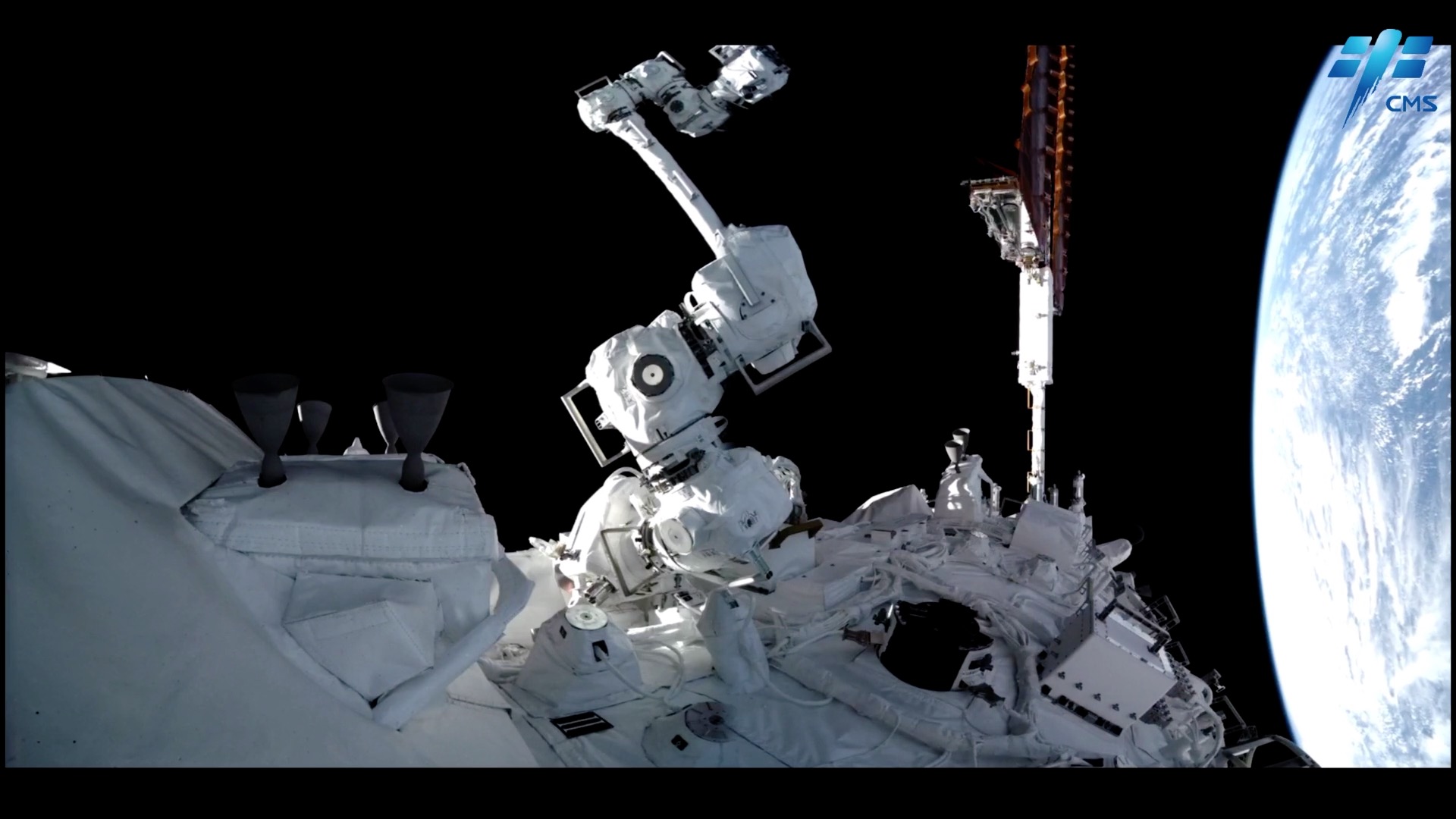
The small robotic arm on board the Wentian lab module of China's space station has performed a series of in-orbit tests, achieving the expected results, China Manned Space Agency said on Tuesday.
The Wentian lab module was launched on July 24 from the Wenchang Spacecraft Launch Site in south China's Hainan Province. It is the largest and heaviest spacecraft China has developed.
The small robotic arm, measuring about 6 meters, can manipulate payloads of up to three tonnes. It can combine with the existing large robotic arm of the Tianhe core module to assist astronauts' extravehicular activities and help in the maintenance and repair of the space station.
Let's take a look at the tests the small robotic arm completed recently.
1. Unlocking of aerospace pyrotechnic devices
The first thing to do during the test was to unlock the aerospace pyrotechnic devices. Once unlocked, the small robotic arm can be powered up and run its tests. Aerospace pyrotechnic devices refer to disposable components and devices that ignite gunpowder or detonate explosives for mechanical work.
2. Self-inspection
Ground researchers examined the various products of the small robotic arm, including controller status confirmation and examinations of joints and distal ends of the arm.
3. Single joint deployment
Single joint deployment was to test each joint of the small robotic arm to make sure that the joints can be properly deployed. The small arm will conduct detailed operations and inspections on the space station, which require it to be able to cover a certain area range.
4. Confirmation of crawling ability
The small arm's crawling ability on the surface of the space station was then tested, which is an important basis for the arm to carry out extravehicular operations.
5. Disengage from the base
When the distal end of the arm docked with one of the adapters on the surface of the space station, the other end needed to disengage from its base. This was the "first step" the robotic arm made. The arm can "walk" outside the space station by repeating this process.
6. Inspection of adapters, solar array and exit hatches
The small robotic arm passed four adapters during the crawling process. The adapters are like the "footprints" of the robotic arm. After passing through all the "footprints," the small arm ensured that every adapter point was tested and verified. Solar array and exit hatches along the way were also checked.
7. Joint test
After the test of the arm, a joint test of astronauts, the small robotic arm and the arm's operation platform was carried out. The astronauts can operate and test the small robotic arm through the operation platform.